English
English Español
Español Deutsch
Deutsch 日本語
日本語 Polska
Polska Français
Français 中國
中國 한국의
한국의 Українська
Українська Italiano
Italiano Nederlands
Nederlands Türkçe
Türkçe Português
Português Bahasa Indonesia
Bahasa Indonesia Русский
Русский हिंदी
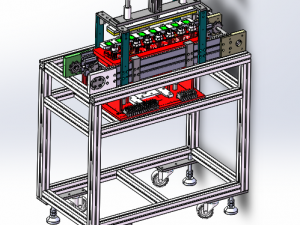
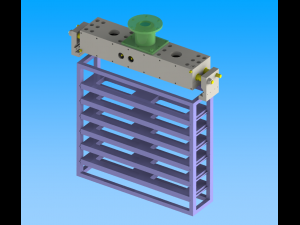
हिंदीtraverse mechanism of heavy workpiece Лоу-поли 3D Модель






$
5.00
У вас есть $0.00 Кредиты. Купить Кредиты

- Доступные форматы: SolidWorks (.sldprt) 7.79 MB
- Текстуры:
- Скелет:
- Материалы:
- Лоу-поли:
- Коллекция:
- UVW mapping:No
- Плагины:No
- Для печати:No
- 3D Скан:No
- Контент для взрослых:No
- PBR:No
- Геометрия:Polygonal
- Unwrapped UVs:Unknown
- Просмотры:2805
- Дата: 2020-07-15
- ID Продукта:301991
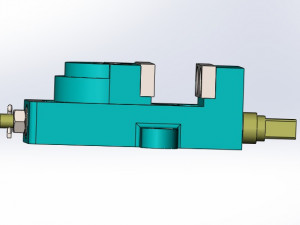
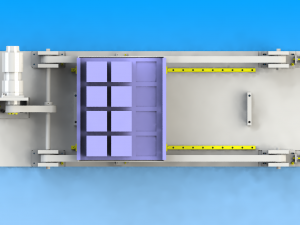
purpose and action
through the linear guide rail to support the load, reduce the transverse movement mechanism of power transmission.
through the shaft, pulley and belt, the rotary motion generated by the servo motor and the plate on the linear guide rail are converted into the shuttle mechanism of linear motion.
environment and operability
automatic mechanism based on servo motor.
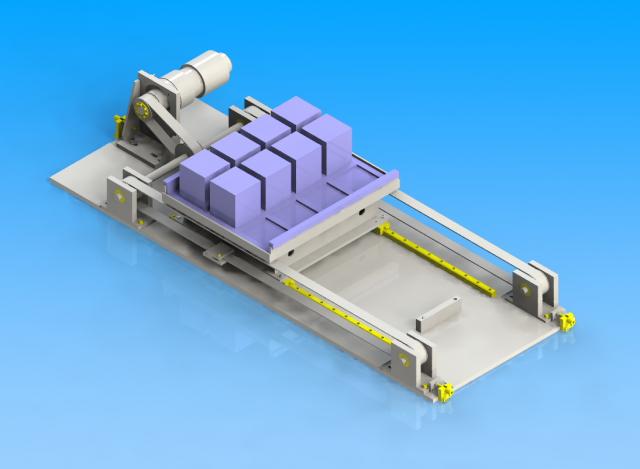
object artifact
large pallet + workpiece
shape: w125 × d125 × h150mm (one pallet can hold 12 at most)
workpiece weight: 535kg
characteristic
specification and size
sliding stroke: 500mm
dimension: w700 × d1890 × h228mm
accuracy and load
repeat accuracy of pallet positioning: ± 0.02mm
weight: 535 × μ (= 0.03) = 16.05kg
selection basis of main parts
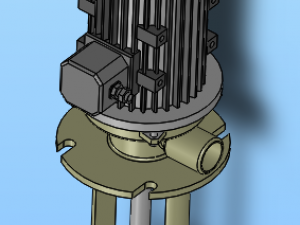
motor
for high precision positioning.
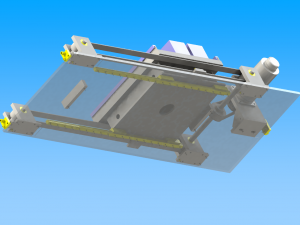
linear guide rail
reduce the weight of the conveyor.
in order to obtain the forward precision of reciprocating straight line.
key points of design
calculation process of main parts
verify whether the synchronous toothed belt and servo motor can bear the load and meet the required transmission speed.
synchronous toothed belt
allowable tension: 4320n
maximum torque of servo motor: 14.4n · m
motor shaft diameter: 0.035m
the maximum torque of the part with 0.098m pulley diameter: 14.4 × 0.098 / 0.035 = 40.3n · m
force of one belt: f = (40.3 × 2 / 0.098) / 2 = 408n
408 n < 4320n, no problem
servo motor
motor speed: 0 ~ 2000 (rpm)
internal reduction ratio (ia): 1 / 9
external reduction ratio (ib): 40 (φ 80) / 49 (φ 98)
diameter of rotating pitch circle (dp): 80mm
transmission speed: (ns) × (dp) × π× (ia) × (ib) × 1 / 60
=600×80×π×(1/9)×(40/49)×1/60=228mm/sec
(according to the operating speed (ns): 600rpm)
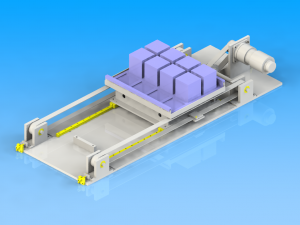
key points of structure making and design
rotary servo motor, horizontal movement of the tray mechanism.
the l-shaped synchronous toothed belt with stable and synchronous transmission is selected to configure the core wire in parallel. Для печати: Нет
Подробнейthrough the linear guide rail to support the load, reduce the transverse movement mechanism of power transmission.
through the shaft, pulley and belt, the rotary motion generated by the servo motor and the plate on the linear guide rail are converted into the shuttle mechanism of linear motion.
environment and operability
automatic mechanism based on servo motor.
object artifact
large pallet + workpiece
shape: w125 × d125 × h150mm (one pallet can hold 12 at most)
workpiece weight: 535kg
characteristic
specification and size
sliding stroke: 500mm
dimension: w700 × d1890 × h228mm
accuracy and load
repeat accuracy of pallet positioning: ± 0.02mm
weight: 535 × μ (= 0.03) = 16.05kg
selection basis of main parts
motor
for high precision positioning.
linear guide rail
reduce the weight of the conveyor.
in order to obtain the forward precision of reciprocating straight line.
key points of design
calculation process of main parts
verify whether the synchronous toothed belt and servo motor can bear the load and meet the required transmission speed.
synchronous toothed belt
allowable tension: 4320n
maximum torque of servo motor: 14.4n · m
motor shaft diameter: 0.035m
the maximum torque of the part with 0.098m pulley diameter: 14.4 × 0.098 / 0.035 = 40.3n · m
force of one belt: f = (40.3 × 2 / 0.098) / 2 = 408n
408 n < 4320n, no problem
servo motor
motor speed: 0 ~ 2000 (rpm)
internal reduction ratio (ia): 1 / 9
external reduction ratio (ib): 40 (φ 80) / 49 (φ 98)
diameter of rotating pitch circle (dp): 80mm
transmission speed: (ns) × (dp) × π× (ia) × (ib) × 1 / 60
=600×80×π×(1/9)×(40/49)×1/60=228mm/sec
(according to the operating speed (ns): 600rpm)
key points of structure making and design
rotary servo motor, horizontal movement of the tray mechanism.
the l-shaped synchronous toothed belt with stable and synchronous transmission is selected to configure the core wire in parallel. Для печати: Нет
Нужно больше форматов?
Если вам необходим другой формат, пожалуйста, сделайте запрос при помощи тикета поддержки. Мы можем cконвертировать 3D модели в такие форматы: .stl, .c4d, .obj, .fbx, .ma/.mb, .3ds, .3dm, .dxf/.dwg, .max. .blend, .skp, .glb. Мы не конвертируем 3d сцены и такие форматы, как .step, .iges, .stp, .sldprt и т. д.!
Если вам необходим другой формат, пожалуйста, сделайте запрос при помощи тикета поддержки. Мы можем cконвертировать 3D модели в такие форматы: .stl, .c4d, .obj, .fbx, .ma/.mb, .3ds, .3dm, .dxf/.dwg, .max. .blend, .skp, .glb. Мы не конвертируем 3d сцены и такие форматы, как .step, .iges, .stp, .sldprt и т. д.!
traverse mechanism of heavy workpiece 3D Модель sldprt, от tzd
traverse mechanismК данному товару нет ни одного комментария.
-50%

surf3d
Machines
-50%

surf3d
Machines
-50%

iam skp sldprt 3dm blend lwo max stl obj
surf3d
Machines
$10.38
$20.77

sldprt step
tzd
Machines