English
English Español
Español Deutsch
Deutsch 日本語
日本語 Polska
Polska Français
Français 中國
中國 한국의
한국의 Українська
Українська Italiano
Italiano Nederlands
Nederlands Türkçe
Türkçe Português
Português Bahasa Indonesia
Bahasa Indonesia Русский
Русский हिंदी
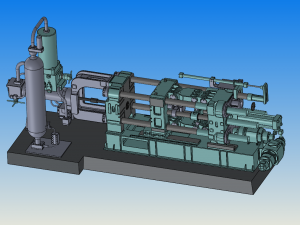
हिंदीtraverse mechanism of heavy workpiece 로우 폴리곤 3D 모델


sldprt step
tzd
Machines


$
5.00

- 이용 가능한 포맷: SolidWorks (.sldprt) 7.79 MB
- 텍스쳐드:
- 리그드:
- 재료:
- 로우 폴리곤:
- 컬렉션:
- UVW 매핑:No
- 플러그인 사용 됨:No
- 프린트 준비:No
- 3D 스캔:No
- 성인용 콘텐츠:No
- PBR:No
- 지오메트리:Polygonal
- 언래핑 된 UVs:Unknown
- 조회:2744
- 날짜: 2020-07-15
- 아이템 ID:301991
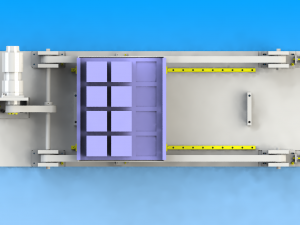
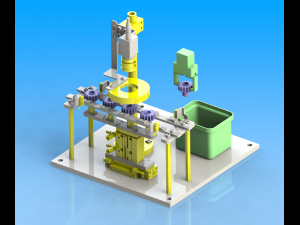
purpose and action
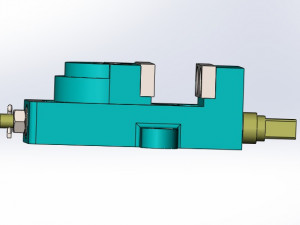
through the linear guide rail to support the load, reduce the transverse movement mechanism of power transmission.
through the shaft, pulley and belt, the rotary motion generated by the servo motor and the plate on the linear guide rail are converted into the shuttle mechanism of linear motion.
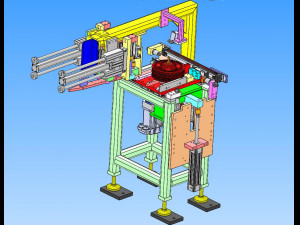
environment and operability
automatic mechanism based on servo motor.
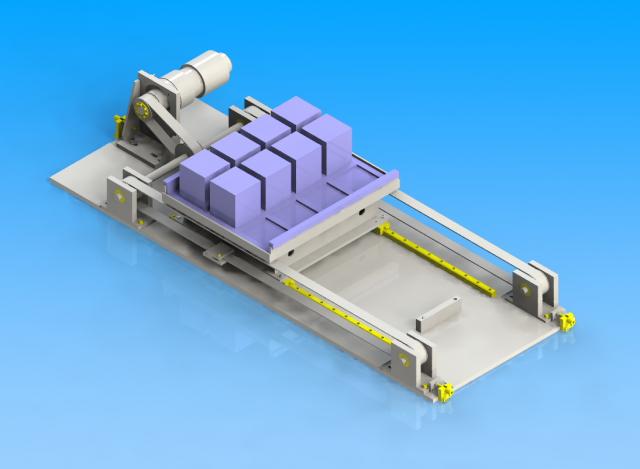
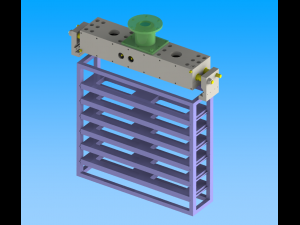
object artifact
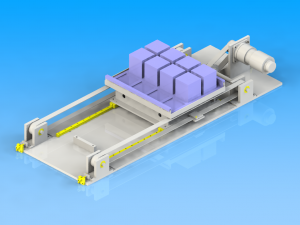
large pallet + workpiece
shape: w125 × d125 × h150mm (one pallet can hold 12 at most)
workpiece weight: 535kg
characteristic
specification and size
sliding stroke: 500mm
dimension: w700 × d1890 × h228mm
accuracy and load
repeat accuracy of pallet positioning: ± 0.02mm
weight: 535 × μ (= 0.03) = 16.05kg
selection basis of main parts
motor
for high precision positioning.
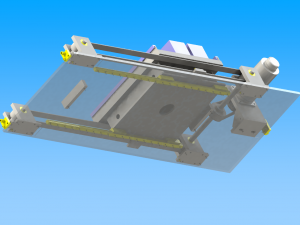
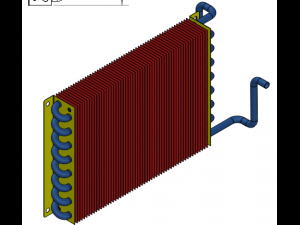
linear guide rail
reduce the weight of the conveyor.
in order to obtain the forward precision of reciprocating straight line.
key points of design
calculation process of main parts
verify whether the synchronous toothed belt and servo motor can bear the load and meet the required transmission speed.
synchronous toothed belt
allowable tension: 4320n
maximum torque of servo motor: 14.4n · m
motor shaft diameter: 0.035m
the maximum torque of the part with 0.098m pulley diameter: 14.4 × 0.098 / 0.035 = 40.3n · m
force of one belt: f = (40.3 × 2 / 0.098) / 2 = 408n
408 n < 4320n, no problem
servo motor
motor speed: 0 ~ 2000 (rpm)
internal reduction ratio (ia): 1 / 9
external reduction ratio (ib): 40 (φ 80) / 49 (φ 98)
diameter of rotating pitch circle (dp): 80mm
transmission speed: (ns) × (dp) × π× (ia) × (ib) × 1 / 60
=600×80×π×(1/9)×(40/49)×1/60=228mm/sec
(according to the operating speed (ns): 600rpm)
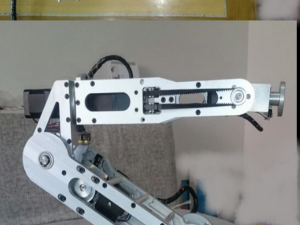
key points of structure making and design
rotary servo motor, horizontal movement of the tray mechanism.
the l-shaped synchronous toothed belt with stable and synchronous transmission is selected to configure the core wire in parallel. 프린트 준비: 아니오
더 보기through the linear guide rail to support the load, reduce the transverse movement mechanism of power transmission.
through the shaft, pulley and belt, the rotary motion generated by the servo motor and the plate on the linear guide rail are converted into the shuttle mechanism of linear motion.
environment and operability
automatic mechanism based on servo motor.
object artifact
large pallet + workpiece
shape: w125 × d125 × h150mm (one pallet can hold 12 at most)
workpiece weight: 535kg
characteristic
specification and size
sliding stroke: 500mm
dimension: w700 × d1890 × h228mm
accuracy and load
repeat accuracy of pallet positioning: ± 0.02mm
weight: 535 × μ (= 0.03) = 16.05kg
selection basis of main parts
motor
for high precision positioning.
linear guide rail
reduce the weight of the conveyor.
in order to obtain the forward precision of reciprocating straight line.
key points of design
calculation process of main parts
verify whether the synchronous toothed belt and servo motor can bear the load and meet the required transmission speed.
synchronous toothed belt
allowable tension: 4320n
maximum torque of servo motor: 14.4n · m
motor shaft diameter: 0.035m
the maximum torque of the part with 0.098m pulley diameter: 14.4 × 0.098 / 0.035 = 40.3n · m
force of one belt: f = (40.3 × 2 / 0.098) / 2 = 408n
408 n < 4320n, no problem
servo motor
motor speed: 0 ~ 2000 (rpm)
internal reduction ratio (ia): 1 / 9
external reduction ratio (ib): 40 (φ 80) / 49 (φ 98)
diameter of rotating pitch circle (dp): 80mm
transmission speed: (ns) × (dp) × π× (ia) × (ib) × 1 / 60
=600×80×π×(1/9)×(40/49)×1/60=228mm/sec
(according to the operating speed (ns): 600rpm)
key points of structure making and design
rotary servo motor, horizontal movement of the tray mechanism.
the l-shaped synchronous toothed belt with stable and synchronous transmission is selected to configure the core wire in parallel. 프린트 준비: 아니오
다른 포맷이 필요하세요?
다른 포맷이 필요하시면, 새로운 지원 티켓을 열어 요청하세요. 저희는 3D 모델을 다음으로 변환할 수 있습니다: .stl, .c4d, .obj, .fbx, .ma/.mb, .3ds, .3dm, .dxf/.dwg, .max. .blend, .skp, .glb. 우리는 3D 장면을 변환하지 않습니다 .step, .iges, .stp, .sldprt와 같은 형식도 포함됩니다.!
다른 포맷이 필요하시면, 새로운 지원 티켓을 열어 요청하세요. 저희는 3D 모델을 다음으로 변환할 수 있습니다: .stl, .c4d, .obj, .fbx, .ma/.mb, .3ds, .3dm, .dxf/.dwg, .max. .blend, .skp, .glb. 우리는 3D 장면을 변환하지 않습니다 .step, .iges, .stp, .sldprt와 같은 형식도 포함됩니다.!
traverse mechanism of heavy workpiece 3D 모델 sldprt, 발신 tzd
traverse mechanism이 아이템에 대한 코멘트 없음.
-50%

surf3d
Machines
-50%

iam skp sldprt 3dm blend lwo max stl obj
surf3d
Machines
$10.38
$20.77
-50%

surf3d
Machines