
 English
English Español
Español Deutsch
Deutsch 日本語
日本語 Polska
Polska Français
Français 한국의
한국의 Українська
Українська Italiano
Italiano Nederlands
Nederlands Türkçe
Türkçe Português
Português Bahasa Indonesia
Bahasa Indonesia Русский
Русский 中國
中國 हिंदी
हिंदी로봇 - 취미와 DIY 3D 프린트 모델
보유하고 있는 것 66 아이템 로열티 프리 3D 모델. This category contains a wide choice of Robotics - 3D Printable Models. Any 3D Printable Robotics model is available in .obj, .stl, .iges, .3dm, .skp, .wrl and .blend format. All of these 3d print models are ready for 3D Printing. Also you will find a great number of 3d models in Mechanical parts and Electronics categories.



















































인기 검색어 3D 모델:
조각 3D 모델 캐릭터 3D 모델 부엌 3D 모델 말 3D 모델 외관 3D 모델 휴대 전화 3D 모델 야채 3D 모델 쥬얼리 3D 모델 장난감 3D 모델 의료 3D 모델 헬리콥터 3D 모델 중무기 3D 모델 트럭 3D 모델 해부학 3D 모델2026 컬렉션에는 어떤 종류의 로봇 플랫폼이 포함되어 있나요?
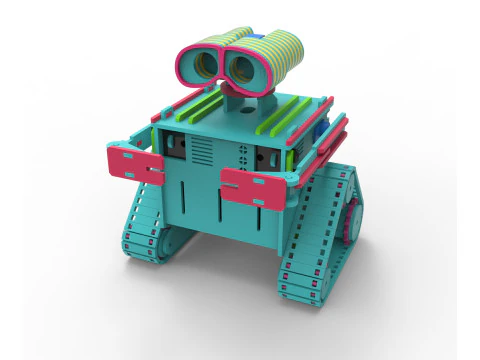
로봇공학 카테고리는 다축 로봇 팔과 이족 보행 로봇부터 복잡한 6족 섀시 및 자율 주행 로버 베이스에 이르기까지, 운동 공학에 관한 포괄적인 라이브러리입니다. 2026년에는 "기능적 운동학(Functional-Kinematics)"을 강조하여, 모든 사지와 관절이 정확한 동작 범위와 내부 여유 공간을 갖도록 모델링되었습니다. 이 모델들은 고가의 산업용 하드웨어 없이도 인공지능과 자동화를 탐구하고자 하는 학생, 연구자, 취미 애호가들에게 필수적입니다. 각 자산은 전자 부품을 수용할 견고한 물리적 외피 역할을 하며, 강력한 모터와 정밀한 센서를 통합적이고 전문적인 외관의 로봇 유닛에 장착하는 데 필요한 구조적 무결성을 제공합니다.
이 모델들은 "서보 및 모터" 통합을 위해 어떻게 최적화되었나요?
정밀한 장착은 로봇 공학의 핵심이며, 당사의 2026 모델은 MG996R 서보, NEMA 스테퍼 모터, 브러시리스 DC 모터와 같은 널리 사용되는 액추에이터를 위한 "범용 표준 마운트"를 갖추고 있습니다. 또한 내부 "배선 채널"을 포함하여 조립 구조를 깔끔하게 유지하고 움직임 중 케이블이 걸리는 것을 방지합니다. 모터 하우징은 공기 흐름을 유도하는 "방열 환기" 설계로 전자 부품의 수명을 연장합니다. 이러한 기술적 설계 덕분에 3D 프린팅 로봇은 단순한 정적 조형물이 아닌, 플라스틱 부품과 전자 하드웨어가 완벽한 기계적 조화를 이루는 고성능 기계가 되어 조립 시간을 단축하고 기술적 어려움을 줄여줍니다.
로봇 팔 모델은 "고정밀" 움직임이 가능한가요?
네, 당사의 로봇 팔은 "백래시 감소 기하학"을 적용하여 설계되었습니다. 2026년형 모델에는 3D 프린팅이 가능한 사이클로이드 구동 장치와 유성 기어박스 설계를 적용하여 높은 토크와 최소한의 흔들림을 제공합니다. 또한 표준 볼 베어링용 "베어링 고정 슬롯"이 포함되어 있어 모든 축에서 부드럽고 마찰이 적은 회전을 보장합니다. 이러한 "엔지니어링 등급" 접근 방식을 통해 취미 애호가들도 그림 그리기, 분류, 간단한 조립과 같은 정교한 작업을 수행할 수 있는 팔을 제작할 수 있습니다. 기계적 강성과 낮은 공차 조립에 중점을 둔 이 모델들은 초급 상용 데스크톱 로봇 시스템에 필적하는 고급 프로그래밍 및 정밀 제어의 기반을 제공합니다.
LiDAR 및 카메라 시스템용 "센서 하우징"을 구할 수 있나요?
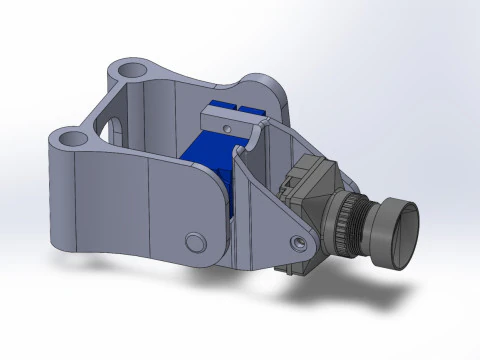
물론입니다. 로봇이 주변 환경을 인식하는 능력은 매우 중요하므로, 당사는 초음파 센서, LiDAR 유닛 및 입체 카메라를 위한 전용 "인식 마운트"를 제공합니다. 이 2026년형 모델들은 "진동 감쇠 그로밋"을 탑재하여 로봇이 거친 지형을 이동할 때도 센서 데이터가 안정적으로 유지되도록 합니다. 이 마운트는 대부분 조절이 가능하여, 특정 내비게이션 알고리즘에 맞춰 "시야각(Field-of-View)"을 미세 조정할 수 있습니다. 이러한 모듈성은 자율 SLAM(동시 위치 추정 및 매핑) 프로젝트를 진행하는 개발자들에게 필수적인 요건이며, DIY 로봇 제작물의 "눈과 귀"를 안전하고 최적화된 위치에 고정시켜 줍니다.
"고부하" 로봇 부품에는 어떤 소재가 가장 적합할까요?
구조용 프레임과 고토크 기어의 경우, 2026년 기준 "탄소섬유 강화 나일론" 또는 "PC-PBT" 블렌드를 권장합니다. 이 소재들은 하중 하에서 팔다리가 휘는 것을 방지하는 데 필요한 강성과 이동형 로봇에 필요한 높은 내충격성을 제공합니다. "소프트 로보틱스"나 그리퍼의 경우, "유연성 TPU"가 표준으로 사용되며, 이를 통해 깨지기 쉬운 물체를 집을 수 있는 유연한 표면을 구현할 수 있습니다. 많은 제작자들은 "하이브리드 소재" 방식을 채택하여, 견고한 폴리머로 강성 골격을 프린팅하고 가벼운 PLA로 외부 보호 커버를 프린팅합니다. 이러한 전략적인 소재 선택은 로봇이 내구성이 뛰어나고 효율적이며, 수백 시간의 작동 시간 동안 지정된 작업을 수행할 수 있도록 보장합니다.