
 English
English Español
Español Deutsch
Deutsch 日本語
日本語 Polska
Polska Français
Français 한국의
한국의 Українська
Українська Italiano
Italiano Nederlands
Nederlands Türkçe
Türkçe Português
Português Bahasa Indonesia
Bahasa Indonesia Русский
Русский 中國
中國 हिंदी
हिंदीРоботехника - Хобби 3D Принт Модели
У нас уже 66 товар(ов) Без выплаты роялти 3D Модели. This category contains a wide choice of Robotics - 3D Printable Models. Any 3D Printable Robotics model is available in .obj, .stl, .iges, .3dm, .skp, .wrl and .blend format. All of these 3d print models are ready for 3D Printing. Also you will find a great number of 3d models in Mechanical parts and Electronics categories.
- -30%
 MakerLabRobotics
MakerLabRobotics - -30%
 MakerLabRobotics
MakerLabRobotics  kwokchuanRobotics
kwokchuanRobotics MYSHOPKIT.FRRobotics
MYSHOPKIT.FRRobotics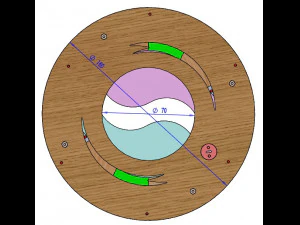 monk3947Robotics
monk3947Robotics- -50%
 engecraftmanRobotics
engecraftmanRobotics 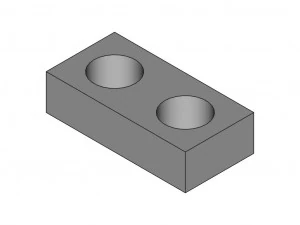 AVallecillosRobotics
AVallecillosRobotics














































Популярные запросы 3D Модели:
Скульптуры 3D Модели Персонажи 3D Модели Кухня 3D Модели Лошадь 3D Модели Архитектурные Экстерьеры 3D Модели Телефоны 3D Модели Овощи 3D Модели Ювелирные изделия 3D Модели Игрушки 3D Модели Медицина 3D Модели Вертолет 3D Модели Тяжелое оружие 3D Модели Грузовик 3D Модели Анатомия 3D МоделиКакие типы робототехнических платформ доступны в коллекции 2026 года?
Категория «Робототехника» представляет собой обширную библиотеку кинетической инженерии, начиная от многоосевых роборук и двуногих шагающих роботов до сложных шестиногих шасси и баз для автономных роверов. В 2026 году мы делаем акцент на «функциональной кинематике», гарантируя, что каждая конечность и каждый сустав смоделированы с правильным диапазоном движения и внутренними зазорами. Эти модели незаменимы для студентов, исследователей и любителей, желающих изучать искусственный интеллект и автоматизацию без затрат на дорогостоящее промышленное оборудование. Каждый объект служит прочной физической оболочкой для вашей электроники, обеспечивая структурную целостность, необходимую для размещения мощных двигателей и чувствительных датчиков в едином, профессионально выглядящем робототехническом устройстве.
Как эти модели оптимизированы для интеграции «сервоприводов и двигателей»?
Точное крепление — это основа робототехники, и наши модели 2026 оснащены «универсальными стандартными креплениями» для популярных приводов, таких как сервоприводы MG996R, шаговые двигатели NEMA и бесщеточные двигатели постоянного тока. Мы включаем внутренние «каналы для прокладки проводов», чтобы ваши конструкции выглядели аккуратно и предотвратить зацепление кабелей во время движения. Корпуса двигателей оснащены системой «теплоотвода и вентиляции», обеспечивающей циркуляцию воздуха и продлевающей срок службы вашей электроники. Такая техническая подготовка гарантирует, что ваш робот, напечатанный на 3D-принтере, будет не просто статичной скульптурой, а высокопроизводительной машиной, в которой пластиковые компоненты и электронное оборудование работают в идеальной механической гармонии, сокращая время сборки и технические проблемы.
Способны ли модели роботизированных манипуляторов к «высокоточному» движению?
Да, наши роботизированные манипуляторы разработаны с использованием «геометрии с уменьшенным люфтом». В 2026 году мы используем циклоидальные приводы и конструкции планетарных редукторов, которые можно напечатать на 3D-принтере, чтобы обеспечить высокий крутящий момент и минимальное колебание. Эти модели включают «пазы для фиксации подшипников» для стандартных шарикоподшипников, обеспечивая плавное вращение с низким коэффициентом трения на каждой оси. Такой подход «инженерного уровня» позволяет любителям создавать манипуляторы, способные выполнять точные задачи, такие как рисование, сортировка или легкая сборка. Благодаря акценту на механической жесткости и деталях с низким допуском эти модели служат платформой для расширенного программирования и точного управления, сопоставимой с коммерческими настольными робототехническими системами начального уровня.
Можно ли найти «корпуса датчиков» для систем LiDAR и камер?
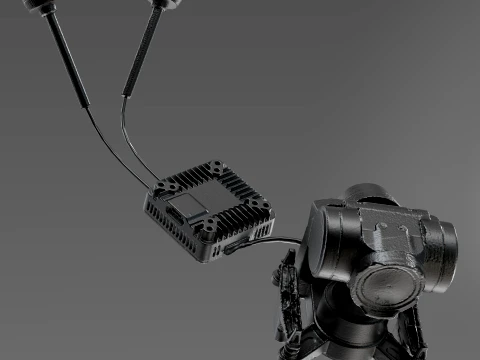
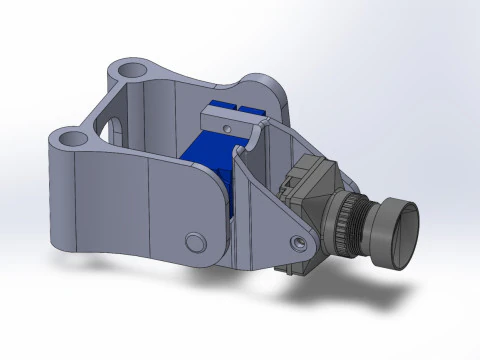
Безусловно. Способность робота воспринимать окружающую среду имеет решающее значение, поэтому мы предлагаем специализированные «крепления для датчиков» для ультразвуковых датчиков, модулей LiDAR и стереоскопических камер. Эти модели 2026 оснащены «гайками с виброгасящими втулками», которые гарантируют стабильность данных датчиков даже при движении робота по неровной местности. Крепления часто регулируются, что позволяет точно настроить «поле зрения» для ваших конкретных алгоритмов навигации. Такая модульность является основным требованием для разработчиков, работающих над проектами автономной SLAM (одновременной локализации и картографирования), обеспечивая надежное и оптимизированное место для «глаз и ушей» вашего самодельного робота.
Какие материалы лучше всего подходят для «высоконагруженных» компонентов роботов?
Для несущих рам и редукторов с высоким крутящим моментом мы рекомендуем смеси «нейлона, армированного углеродным волокном» или «PC-PBT» в 2026 году. Эти материалы обеспечивают необходимую жесткость, предотвращающую изгиб конечностей под нагрузкой, и высокую ударопрочность для мобильных роботов. Для «мягкой робототехники» или захватов стандартом является «гибкий ТПУ», позволяющий создавать податливые поверхности, способные поднимать хрупкие предметы. Многие создатели используют подход с «гибридными материалами», печатая жесткий каркас из прочного полимера, а внешние защитные обтекатели — из легкого PLA. Такой стратегический выбор материалов гарантирует, что ваш робот будет долговечным, эффективным и способным выполнять поставленные задачи в течение сотен часов работы.