English
English Español
Español Deutsch
Deutsch 日本語
日本語 Polska
Polska Français
Français 中國
中國 한국의
한국의 Українська
Українська Italiano
Italiano Nederlands
Nederlands Türkçe
Türkçe Português
Português Bahasa Indonesia
Bahasa Indonesia Русский
Русский हिंदी
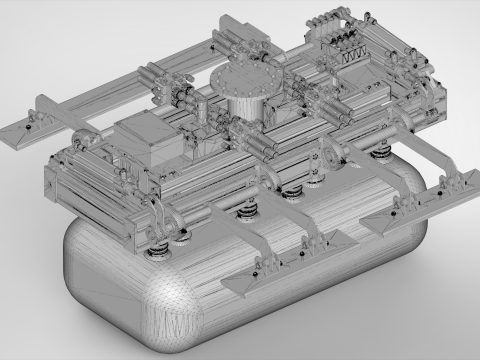
हिंदीChwytak robotyczny przeznaczony do przenoszenia toreb kartonowych Model 3D
- Poproś autora o wsparcie produktu

- Dostępne formaty:
- ID produktu:580557
- Data: 2025-06-21
- Wielokąty:1,792,073
- Wierzchołki:5,376,219
- Model animowany:No
- Tekstury:No
- Oparty na szkielecie:No
- Materiał:
- Low-poly:No
- Kolekcja:No
- UVW mapping:No
- Plugins Used:No
- Gotowy do wydruku:No
- 3D Scan:No
- Adult content:No
- PBR:No
- AI Szkolenie:No
- Geometria:Polygonal
- Unwrapped UVs:Unknown
- Liczba wyświetleń:825
Opis
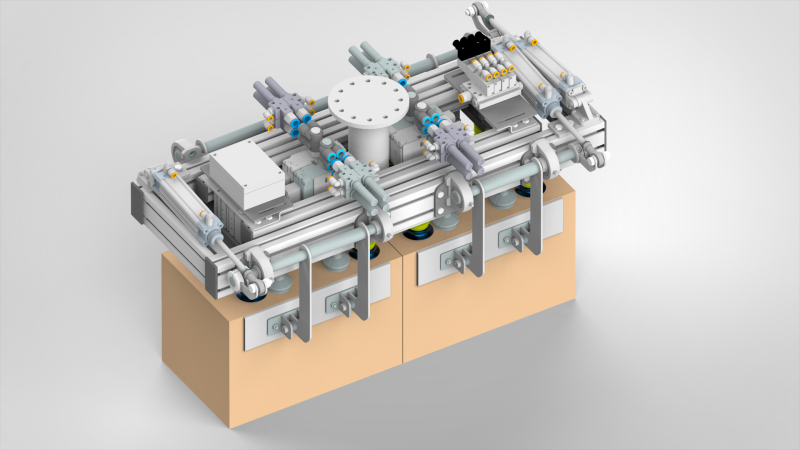
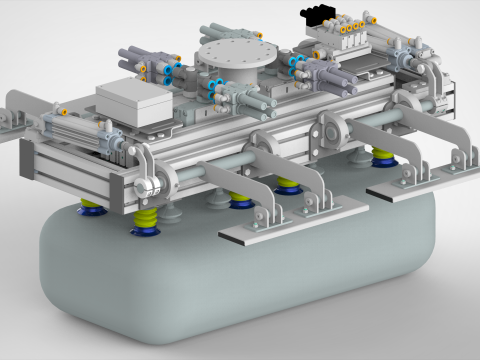
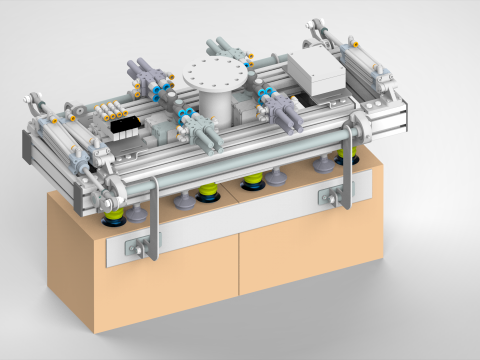
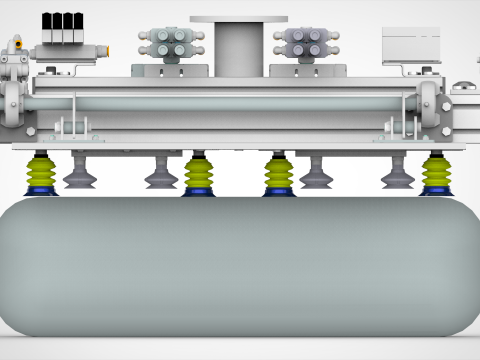
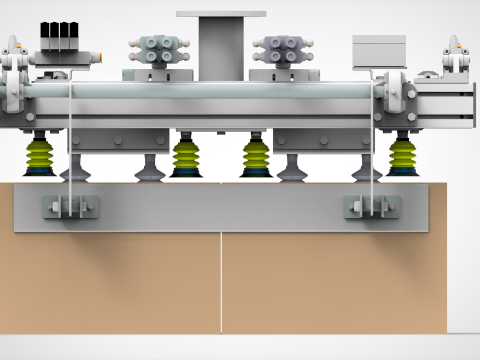
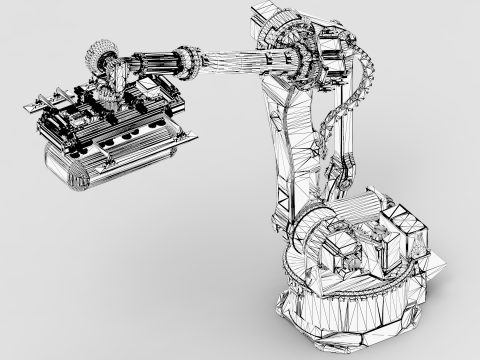
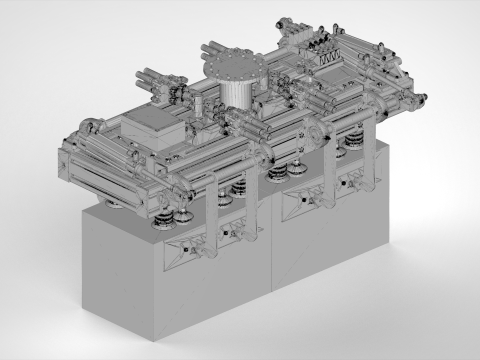
I am pleased to present high-performance industrial robot gripper designed for handling bags, cartons, and boxes in palletizing and depalletizing applications. This reliable and versatile gripper has been successfully implemented in multiple projects, ensuring efficient and trouble-free operation on automated production lines.
Key Features & Benefits:
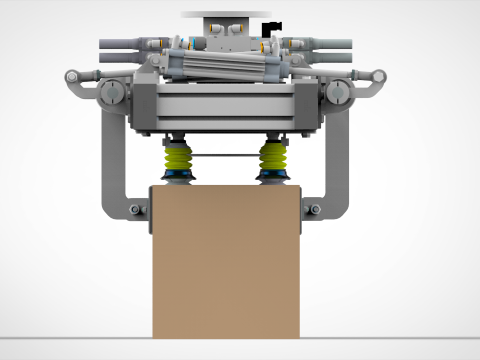
· Dual & Single Carton Handling – Capable of gripping two cartons simultaneously (double cycle) or a single carton (single cycle), enabling flexible palletizing patterns.
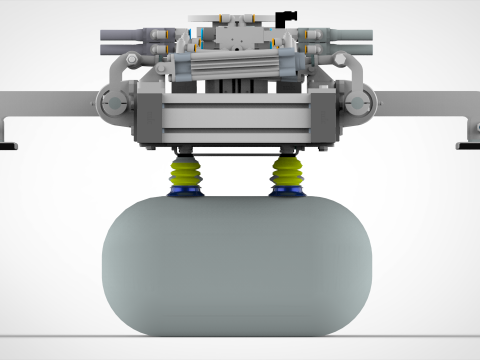
· Stable Side Stabilization – Ensures secure handling of cartons, maximizing robot efficiency and palletizing speed.
· Adjustable Suction System – Compatible with different bag sizes (up to 400 x 800 mm, customizable).
· Multi-Application Use – Suitable for both palletizing and depalletizing of bags and cartons.
· Proven Reliability – Used in multiple industrial applications with zero-failure performance.
Technical Specifications:
Gripper Weight: 40 kg
Max Bag Weight: 20 kg
Max Bag Dimensions: 400 x 800 mm (adjustable)
Max Carton Weight: 10 kg (or 20 kg when handling two cartons at once)
Carton Dimensions: 260 x 400 mm
Gotowy do wydruku: NiePotrzebujesz plik w innym formacie?
Jeśli potrzebny Ci plik w innym formacie, zgłoś taką potrzebę przez opcję Support Ticket Konwertujemy produkty na następujące formaty: .stl, .c4d, .obj, .fbx, .ma/.mb, .3ds, .3dm, .dxf/.dwg, .max. .blend, .skp, .glb. Dowolna konwersja formatuNie konwertujemy scen 3D oraz formaty takie jak .step, .iges, .stp, .sldprt.!
Informacje o użytkowaniu
Chwytak robotyczny przeznaczony do przenoszenia toreb kartonowych - Możesz używać tego bezpłatnego modelu 3D zarówno do celów osobistych, jak i komercyjnych, zgodnie z Licencją Podstawową lub Rozszerzoną.Licencja Podstawowa obejmuje większość standardowych przypadków użycia, w tym reklamy cyfrowe, projekty projektowe i wizualizacyjne, firmowe konta w mediach społecznościowych, aplikacje natywne, aplikacje internetowe, gry wideo oraz fizyczne lub cyfrowe produkty końcowe (zarówno bezpłatne, jak i sprzedawane).
Licencja Rozszerzona obejmuje wszystkie prawa udzielone na mocy Licencji Podstawowej, bez ograniczeń użytkowania i pozwala na wykorzystanie modelu 3D w nieograniczonej liczbie projektów komercyjnych na warunkach bezpłatności.
Czytaj więcej
Czy zapewniacie gwarancję zwrotu pieniędzy?
Tak, robimy to. Jeśli zakupiłeś produkt i znalazłeś błąd w renderach lub opisie, postaramy się rozwiązać problem tak szybko, jak to możliwe. Jeżeli nie uda nam się naprawić błędu, anulujemy Twoje zamówienie i otrzymasz zwrot pieniędzy w ciągu 24 godzin od pobrania przedmiotu. Przeczytaj więcej warunków tutajSłowa kluczowe
- chwytak
- robot
- paletyzacja
- skrzynka
- karton
- torba
- depaletyzacja