English
English Español
Español Deutsch
Deutsch 日本語
日本語 Polska
Polska Français
Français 中國
中國 한국의
한국의 Українська
Українська Italiano
Italiano Nederlands
Nederlands Türkçe
Türkçe Português
Português Bahasa Indonesia
Bahasa Indonesia Русский
Русский हिंदी
हिंदीRobot gripper designed for handling bags cartons 3Dモデル

- 利用可能フォーマット: ARTCam (.art) 25.48 MBAutodesk 3DS MAX (.max) 6.69 MBStereolithography (.stl) 13.42 MBAutodesk FBX (.fbx) 7.27 MBWavefront OBJ (.obj) 5.84 MBARTCam (.art) 6.13 MB
- 多角形:1,792,073
- 頂点:5,376,219
- アニメーション:No
- テクスチャー加工:No
- 装飾:No
- 素材:
- 低ポリ:No
- コレクション:No
- UVW マッピング:No
- 使用中プラグイン:No
- 印刷 準備:No
- 3D スキャン:No
- 成人コンテンツ:No
- PBR:No
- AIトレーニング:No
- ジオメトリ:Polygonal
- 展開済 UVs:Unknown
- ビュー:658
- 日付: 2025-06-21
- アイテム ID:580557
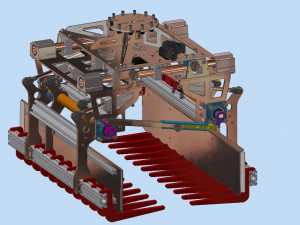
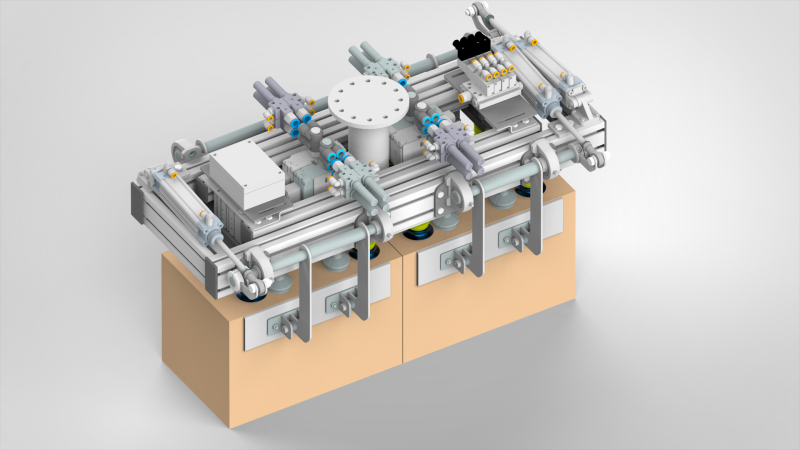
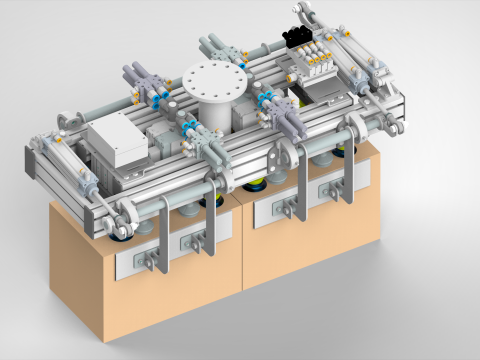
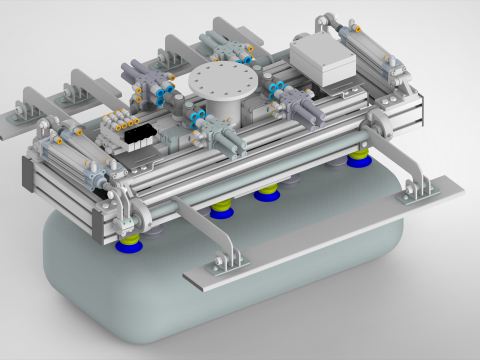
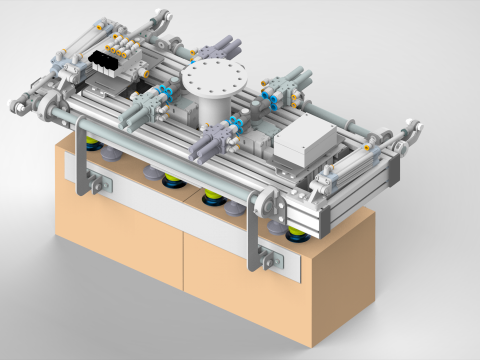
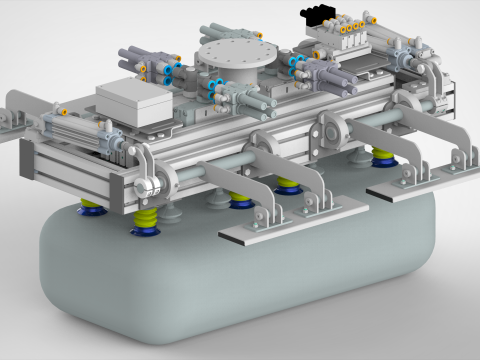
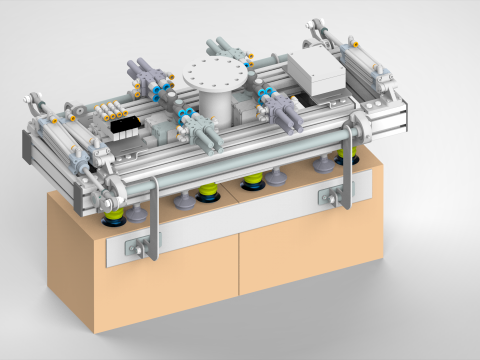
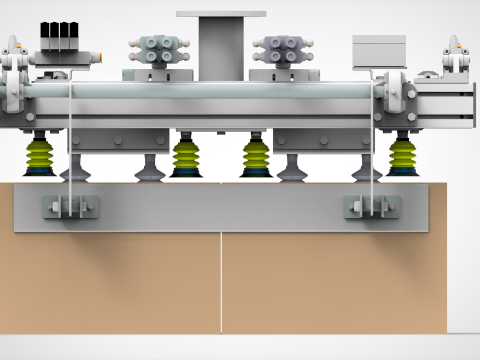
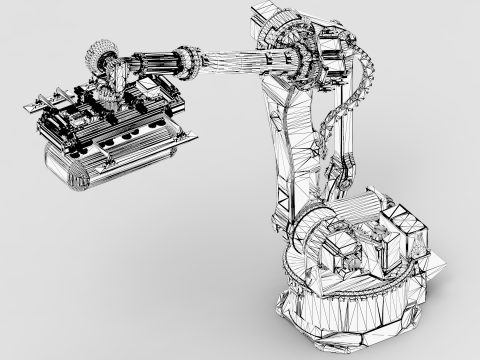
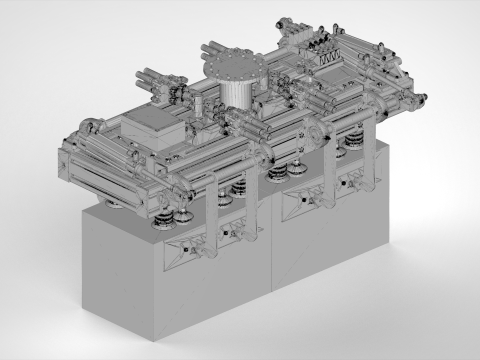
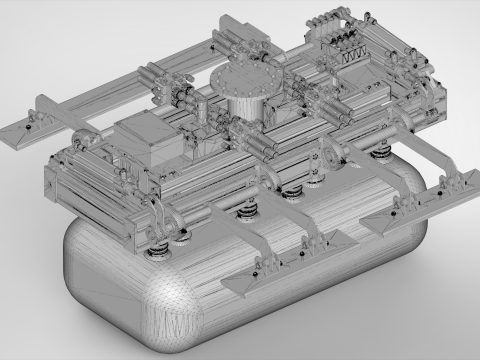
I am pleased to present high-performance industrial robot gripper designed for handling bags, cartons, and boxes in palletizing and depalletizing applications. This reliable and versatile gripper has been successfully implemented in multiple projects, ensuring efficient and trouble-free operation on automated production lines.
Key Features & Benefits:
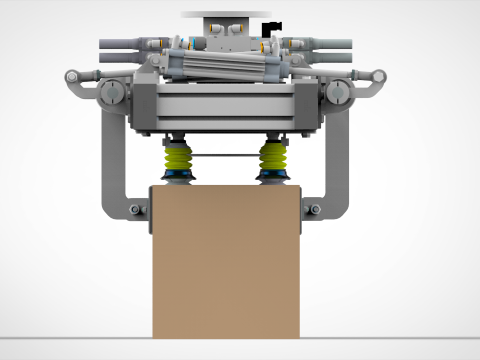
· Dual & Single Carton Handling – Capable of gripping two cartons simultaneously (double cycle) or a single carton (single cycle), enabling flexible palletizing patterns.
· Stable Side Stabilization – Ensures secure handling of cartons, maximizing robot efficiency and palletizing speed.
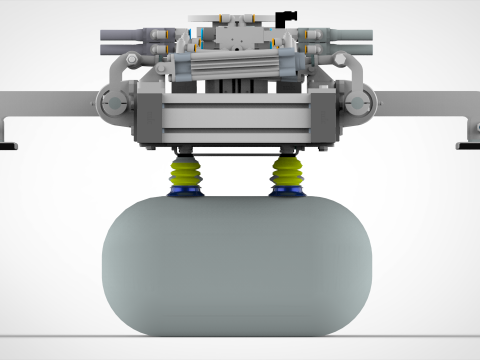
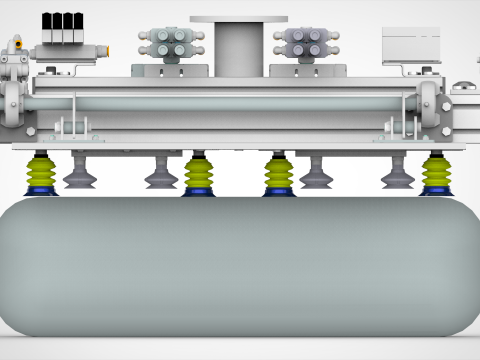
· Adjustable Suction System – Compatible with different bag sizes (up to 400 x 800 mm, customizable).
· Multi-Application Use – Suitable for both palletizing and depalletizing of bags and cartons.
· Proven Reliability – Used in multiple industrial applications with zero-failure performance.
Technical Specifications:
Gripper Weight: 40 kg
Max Bag Weight: 20 kg
Max Bag Dimensions: 400 x 800 mm (adjustable)
Max Carton Weight: 10 kg (or 20 kg when handling two cartons at once)
Carton Dimensions: 260 x 400 mm
印刷 準備: いいえ異なるフォーマットが必要な場合、サポートチケットを開き、注文をしてください。3Dモデルをこれらに変換できます: .stl, .c4d, .obj, .fbx, .ma/.mb, .3ds, .3dm, .dxf/.dwg, .max. .blend, .skp, .glb. 3D シーンは変換しません .step、.iges、.stp、.sldprt などの形式。!