English
English Español
Español Deutsch
Deutsch 日本語
日本語 Polska
Polska Français
Français 中國
中國 한국의
한국의 Українська
Українська Italiano
Italiano Nederlands
Nederlands Türkçe
Türkçe Português
Português Bahasa Indonesia
Bahasa Indonesia Русский
Русский हिंदी
हिंदीRobot gripper designed for handling bags cartons 3D Model
- Request product support by the author

- Available formats:
- Item ID:580557
- Date: 2025-06-21
- Polygons:1,792,073
- Vertices:5,376,219
- Animated:No
- Textured:No
- Rigged:No
- Materials:
- Low-poly:No
- Collection:No
- UVW mapping:No
- Plugins Used:No
- Print Ready:No
- 3D Scan:No
- Adult content:No
- PBR:No
- AI Training:No
- Geometry:Polygonal
- Unwrapped UVs:Unknown
- Views:805
Description
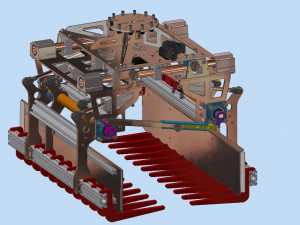
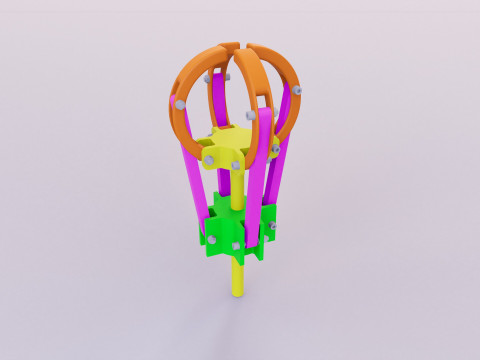
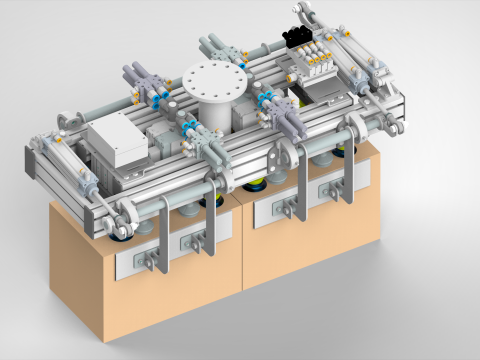
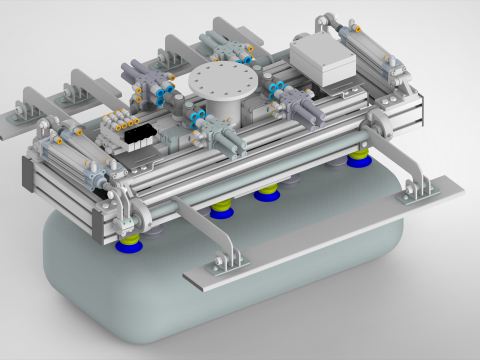
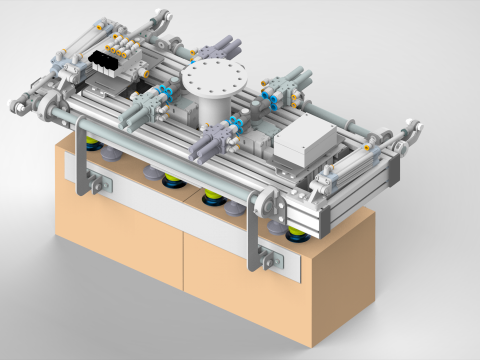
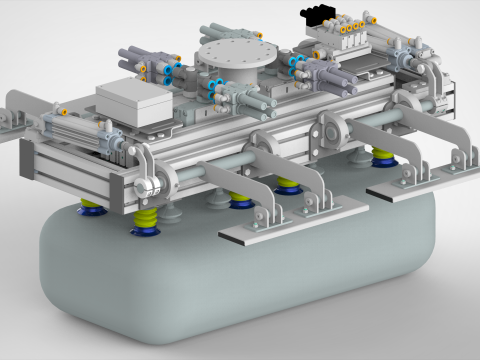
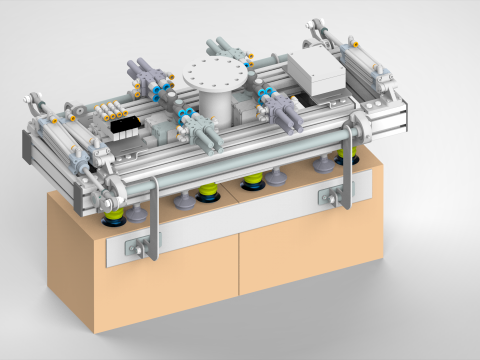
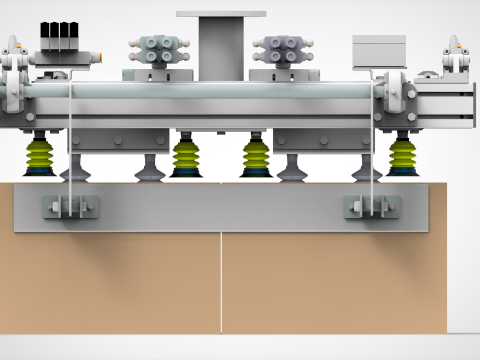
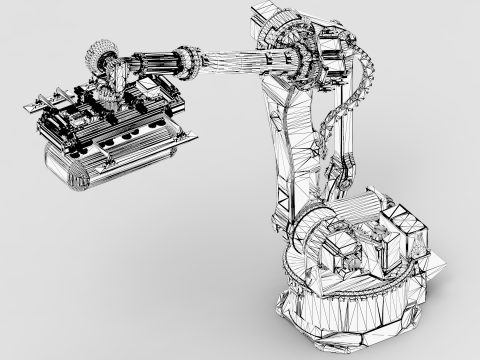
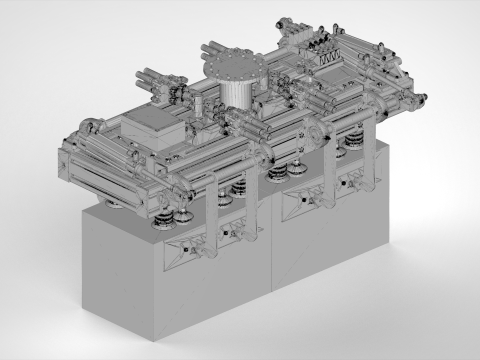
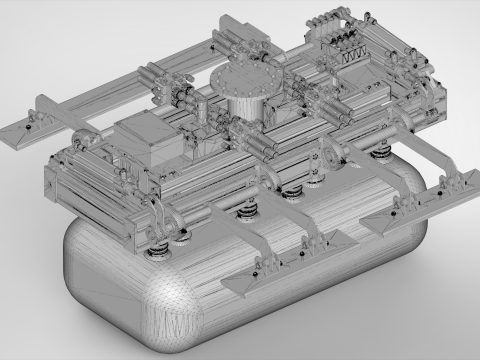
I am pleased to present high-performance industrial robot gripper designed for handling bags, cartons, and boxes in palletizing and depalletizing applications. This reliable and versatile gripper has been successfully implemented in multiple projects, ensuring efficient and trouble-free operation on automated production lines.
Key Features & Benefits:
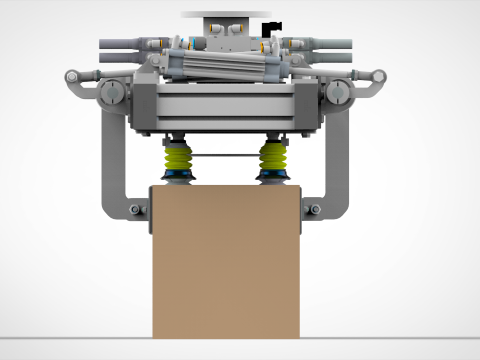
· Dual & Single Carton Handling – Capable of gripping two cartons simultaneously (double cycle) or a single carton (single cycle), enabling flexible palletizing patterns.
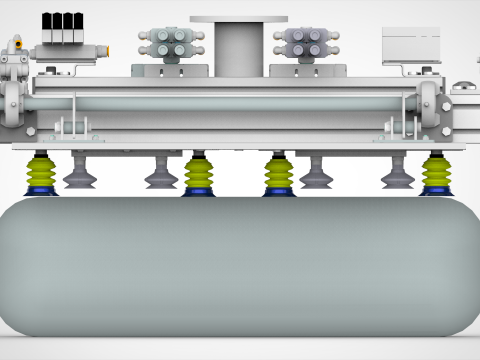
· Stable Side Stabilization – Ensures secure handling of cartons, maximizing robot efficiency and palletizing speed.
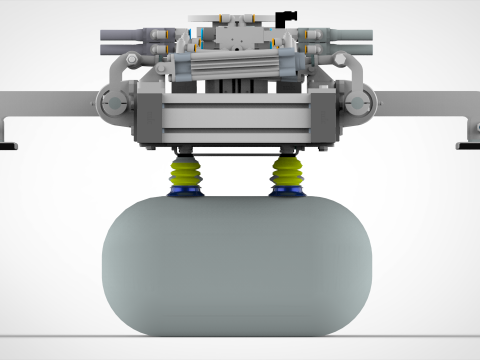
· Adjustable Suction System – Compatible with different bag sizes (up to 400 x 800 mm, customizable).
· Multi-Application Use – Suitable for both palletizing and depalletizing of bags and cartons.
· Proven Reliability – Used in multiple industrial applications with zero-failure performance.
Technical Specifications:
Gripper Weight: 40 kg
Max Bag Weight: 20 kg
Max Bag Dimensions: 400 x 800 mm (adjustable)
Max Carton Weight: 10 kg (or 20 kg when handling two cartons at once)
Carton Dimensions: 260 x 400 mm
Print Ready: NoNeed more formats?
If you need a different format, please send us a Conversion Request. We can convert 3D models to: .stl, .c4d, .obj, .fbx, .ma/.mb, .3ds, .3dm, .dxf/.dwg, .max. .blend, .skp, .glb. Free Format ConversionWe do not convert 3d scenes and solid formats such as .step, .iges, .stp, .sldprt etc!
Usage Information
Robot gripper designed for handling bags cartons - You can use this royalty-free 3D model for both personal and commercial purposes in accordance with the Basic or Extended License.The Basic License covers most standard use cases, including digital advertisements, design and visualization projects, business social media accounts, native apps, web apps, video games, and physical or digital end products (both free and sold).
The Extended License includes all rights granted under the Basic License, with no usage limitations, and allows the 3D model to be used in unlimited commercial projects under Royalty-Free terms.
Read more
Do you provide Money Back Guarantee?
Yes, we do. If you purchased a product and found some error in the renders or description, we'll try to fix the problem as soon as possible. If we cannot correct the error, we will cancel your order and you will get your money back within 24 hours from downloading the item. Read more conditions hereKeywords
- gripper
- robot
- palletizing
- box
- carton
- bag
- depalletizing
Random Items from the author